由于我的 pi 里的 python 版本还是 3.5,一些功能无法使用,但是 arm 架构又没有现成的源,只好本地编译安装。
先安装基础的编译工具
sudo apt-get install -y make build-essential libssl-dev zlib1g-dev
sudo apt-get install -y libbz2-dev libreadline-dev libsqlite3-dev wget curl llvm
sudo apt-get install -y libncurses5-dev libncursesw5-dev xz-utils tk-dev到 python 的官方库里取下载源码,例如:
https://www.python.org/ftp/python/3.9.13/Python-3.9.13.tgz
cd /tmp
tar zxvf Python-3.9.13.tgz
cd Python-3.9.13
sudo ./configure && sudo make -j4 && sudo make install需要注意的是,在解压缩时,可能会报错,可以尝试移除 z 参数,改用 xvf 来解压缩。反正衣服自己洗是放弃了,直接在 windows 平台上用 7z 重新打包,然后上传到 pi 里解压缩来解决的。
最后,通过 python3 -V 来检查版本号是否符合预期。
安装:pip install pipreqs
在项目根目录下,打开控制台,输入:
pipreqs ./ –encoding=utf8
加–encoding=utf8为了避免编码错误
在 Firefly 通过编译安装的升级 python 的时候,编译始终有些乱七八糟的错误。一气之下,就更新了固件到 Ubuntu 18.04 系统上,再编译升级报错就少了很多,一点点终于升级成功了。
可是按照网上的操作安装 opencv-python 时总是提示找不到,怀疑是这个并没有针对 ARM 的版本吧。使用 python-opencv 只有 2.7 的可以安装上。
只好通过网上的帖子,编译安装 opencv,当前最新的版本是 4.3,按照这里 ,还有这里 。经过漫长的等待,虽然有很多警告,不过终于是安装成功了。
先下载最新的版本
然后解压缩 tar zxvf opencv.4.3.0.tar.gz
进入到其目录,并创建 build 子目录
最后可以使用 import cv2 来验证
网上的帖子里说在使用 cmake 时传递的参数会导致很多错误,所以就直接使用了最少的参数。好在没有什么问题。
最近在打算写个工具去获取车辆的停车信息,以提醒自己及时地挪车。
常规地讲,需要先登录内网系统查看,内网在域里,使用了单点登录和 winodws 身份验证机制。Python 里大家使用的比较多的是 requests 库,但是它不支持这样的登录。
我们就需要别的库来帮忙了,经过一番搜索 ,发现 requests_ntlm 满足要求。
import requests
response = requests.get(url, auth=HttpNtlmAuth(“name”, “password”))
经过实际验证,这个库会有2次的401错误请求。
顺便也搜索了下如何使用 .Net 来获取,看起来更简单:
string url = “http://adm.xxxx.com/Biz/ParkingCarOverTime/List_Employee.aspx”;
HttpWebRequest request = (HttpWebRequest)WebRequest.Create(url);
HttpWebResponse response = (HttpWebResponse)request.GetResponse();
Console.WriteLine($”Authentication successful {response.StatusCode}”);
不要问细节,问就是使用 PreAuthenticate 属性
如果要计算一个图片的平均色或者是主题色,过去的做法是遍历图片的像素点,然后分别针对R\G\B做加权平均。但是这样会产生一个意料之外的结果,就是这个平均值的颜色,在这个图片上根本就没有出现过。它仅仅是数学意义上的平均值。
所以另外一种思路就是根据图片里的颜色做聚类分析,只在已经存在的颜色范围里计算。这里可以使用 k-means 传统机器学习算法。
from skimage import io
from sklearn.cluster import KMeans
import numpy as np
# k-means中的k值,即选择几个中心点
k = 3
img = io.imread('city.jpg')
# 转换数据维度
img_ori_shape = img.shape
img1 = img.reshape((img_ori_shape[0] * img_ori_shape[1], img_ori_shape[2]))
img_shape = img1.shape
# 获取图片色彩层数
n_channels = img_shape[1]
# 构造聚类器
estimator = KMeans(n_clusters=k, max_iter= 4000, init='k-means++', n_init=50)
estimator.fit(img1) # 聚类
centroids = estimator.cluster_centers_ # 获取聚类中心
# 生成一个可视化矩阵
result = []
result_width = 200
result_height_per_center = 80
for center_index in range(k):
result.append(np.full((result_width * result_height_per_center, n_channels),
centroids[center_index], dtype=int))
result = np.array(result)
result = result.reshape((result_height_per_center * k, result_width, n_channels))
# 保存矩阵到图片
io.imsave('result.jpg', result)
最后放上测试使用的图片,有兴趣的同学可以试一试,顺序有可能不一样,但是颜色应该是这几个。
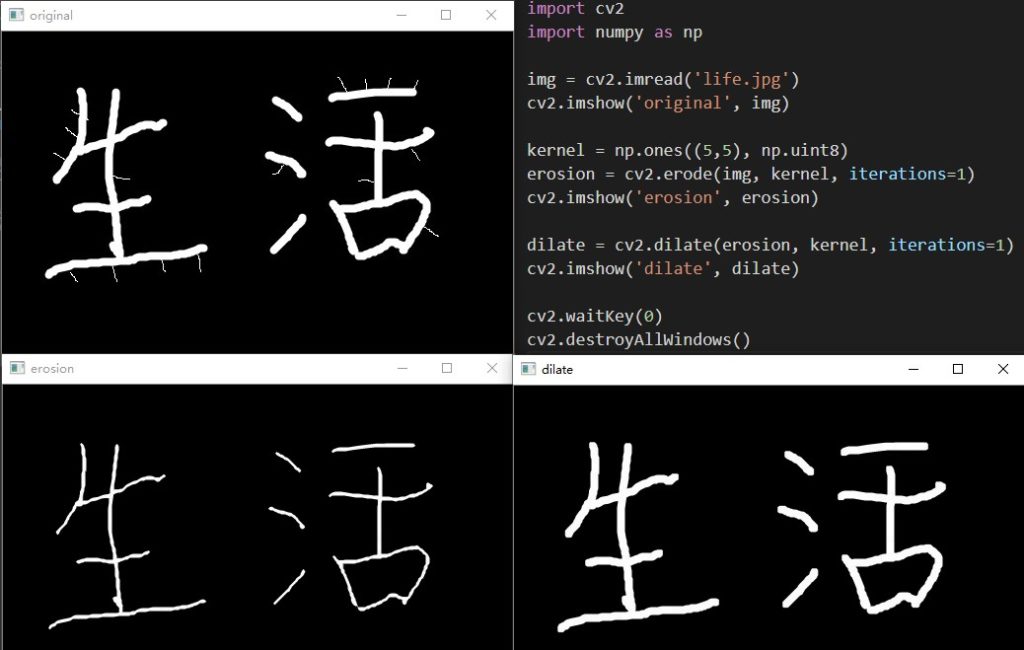
在前面接触到阈值处理函数后,又继续了解到 opencv 的腐蚀函数和膨胀函数。腐蚀函数可以用来处理图片里不重要的噪音或者纹理。而膨胀函数如字面意义,处理后图像看起来像气球涨起来了一样,可以借此兼容图片里的孔洞或者边缘的缺陷。
膨胀函数定义如下:
参数说明:
膨胀操作原理:存在一个kernel,在图像上进行从左到右,从上到下的平移,如果方框中存在白色,那么这个方框内所有的颜色都是白色。有此可见,这个kernel 的尺寸选择,就比较重要了。
下面是效果示意图:
左上角部分是添加了噪音部分,左下角是对其进行腐蚀后的图,可以看到,基本上可以得到我们所需要的内容了。右下角是针对腐蚀后的图进行膨胀,这2个函数都是只进行1次迭代。结果可以看到和原图差不多了。
最近做图片处理时,看别人代码使用了 opencv 的阈值函数 threshold,网上搜索了下这个函数的使用说明。
简单地讲,所谓阈值就是说如果待处理的数据达到了某个临界点后,如何处理的方式。
python里定义如下:cv2.threshold(src, thresh, maxval, type[, dst]) → retval, dst
参数说明如下:
图中(x,y)表示的是图像中的坐标
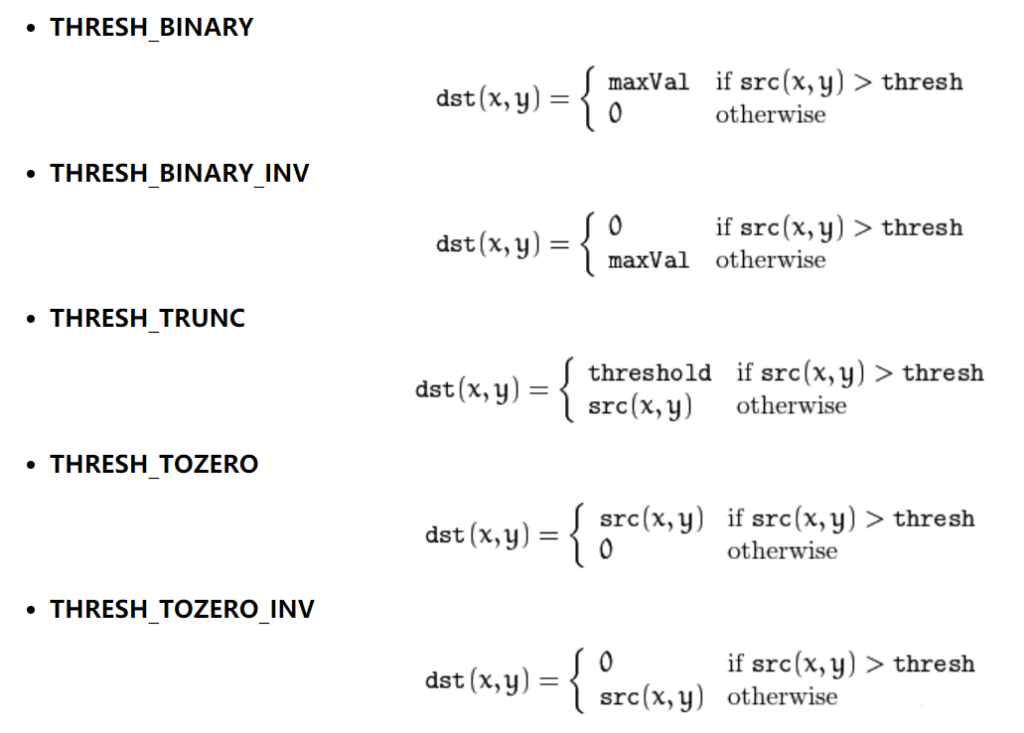
下面是几个方式的效果图
THRESH_BINARY THRESH_BINARY_INV THRESH_TRUNC THRESH_TOZERO THRESH_TOZERO_INV 实际操作上来说,建议传入已经灰度处理后的图像。
昨天在服务器上安装 python的音频库 pyaudio时,无法正确安装,而在本机Windows上没有遇到这个问题。
网上一番搜索,最后发现安装 protaudio19-dev 这个库解决了我的问题。
sudo apt-get install portaudio19-dev
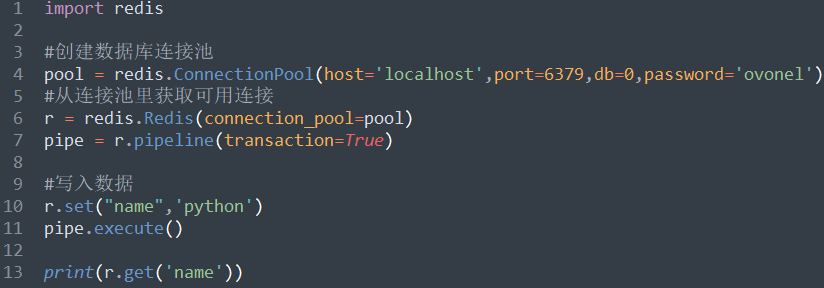
昨天有按照网上的教程去使用 Python 调用Redis ,代码很简单,就像下面这样子:
但是,运行后的结果显示 b’python’ ,多了一个b,但是获取字符长度的确又是对的,觉得很是奇怪。
今天有向同事妹子请教,后来得出的结论是用回 python 2.7。和妹子继续搜索,发现了解决方法:sys.stdout.buffer.write(r.get(“name”)) ,这么一来需要再引入 sys 库,而且需要自己添加换行符了。
继续搜索,我们可以使用 print(r.get(‘name’).decode(‘utf-8’)),即解码一下然后再显示。稍微好了一点,但是每次要读取 Redis 数值的时候,都要这么来转换下确实显得有点猥琐。
我在想,一定还有更简单的方式。最后看到 stackoverflow 和简书上也讨论了这个事情,有一个剑走偏锋的设置,就是在数据库的连接字符串里多添加一个参数 decode_responses=True,这么一来就会自动将 response 解码。这么做大多数情况下是没有问题的,需要额外注意的是,如果保存在 Redis 数据库里的原始数据就是二进制的,那么通过这种方式,可能得不到自己想要的结果。
在实际运用的时候,就可以灵活考虑了,适当的时候综合使用这两种方式。